Lunar Robotics
Click the arrow on the right to explore!

We researched and bought the best individual cells for our needs. Specifically based on power capacity (Wh) and mass (g).
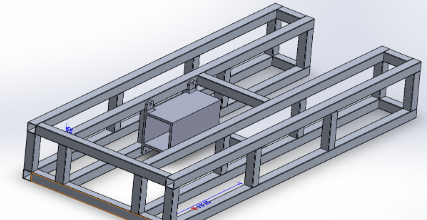
While the cells were coming in, I designed a basic battery mount in SolidWorks

We rotated through testing each cell's voltage, wrapping groups of cells in Kapton tape, cutting nickel strips, and spot welding them together.
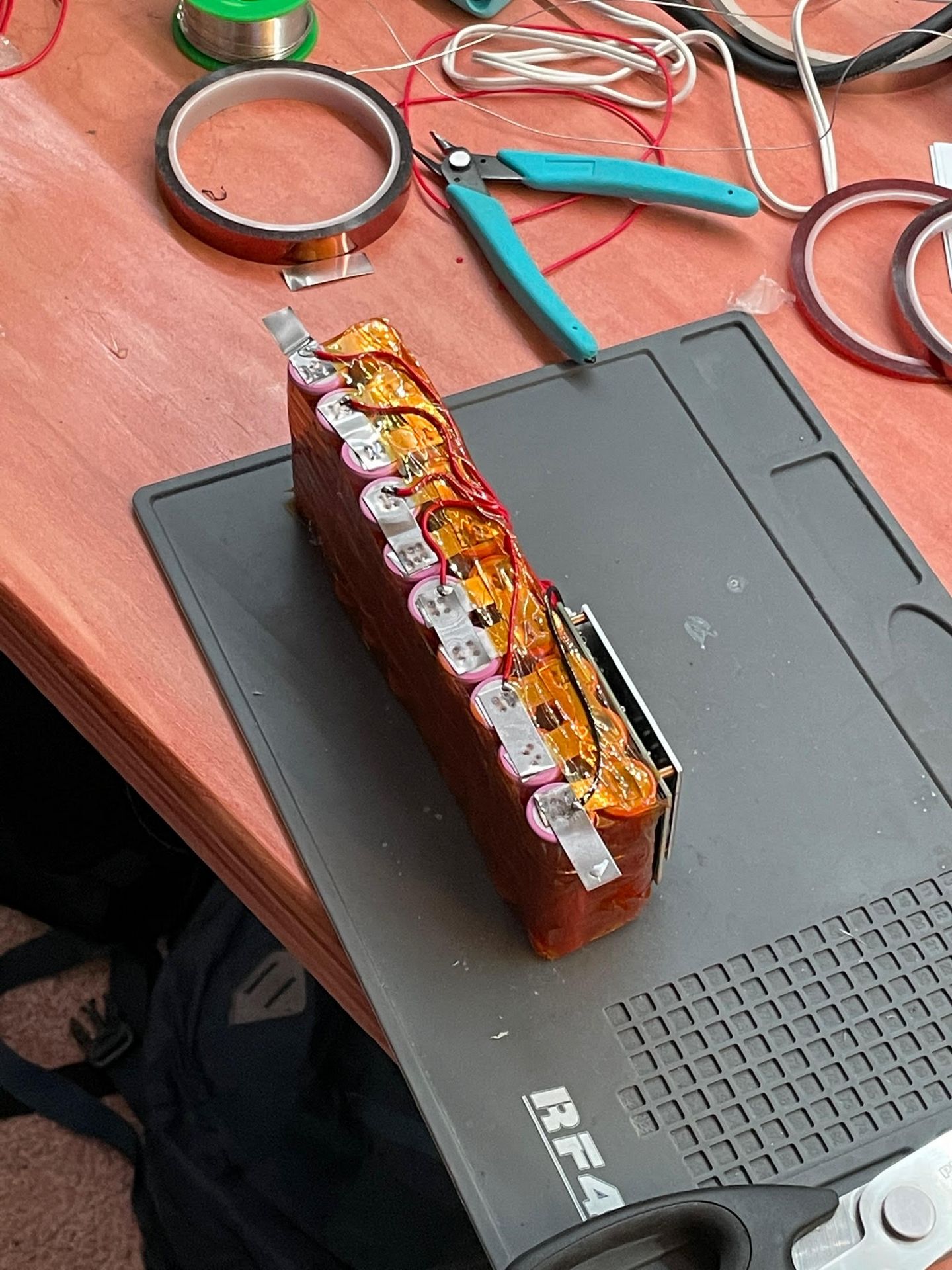
After we made two packs, I soldered on connections to our BMS. This was a very delicate process because if I heated the Li-Ion batteries too much they could explode.
